Viterbi Encoder¶
Class Diagram¶
The UML diagram of Fig. 11 shows the overview of the class.
![@startuml
class sc_core::sc_module
class encoder<int output, int input, int memory> {
.. Inputs ..
sc_in_clk clk
sc_in<sc_lv<input> > in
sc_in<sc_lv<memory * input> > polynomials[output]
.. Outputs ..
sc_out<sc_logic > out
.. Signals ..
sc_signal<sc_lv<memory * input> > mem_bus_conv
sc_signal<bool> clk_div
sc_signal<sc_logic> data_in_drv[memory]
sc_signal<sc_logic> conv_outs[output]
sc_signal<sc_lv<output> > conv_par_bus
sc_signal<sc_lv<memory> > mem_bus[input]
.. Sub-modules ..
convolution<memory * input> * conv_block[output]
shift_register<memory> * register_bank[input]
clock_divider<output> * clk_divider
serializer<output> * serial
__ Processes __
prc_split_input()
prc_update_conv_par_bus()
prc_arrange_memory_bus()
}
encoder -up-|> sc_core::sc_module
@enduml](../_images/plantuml-753a818d8b3c5d1f39f3d0688ccc5dd0054945cb.png)
Fig. 11 Viterbi Encoder Class Diagram¶
Class Description¶
-
template<int
output, intinput, intmemory>
classencoder¶ Viterbi Encoder
-
sc_core::sc_in_clk
clk¶ Input clock
-
sc_in<sc_lv<memory * input>>
polynomials[output]¶ Polynomials to convolve with
-
sc_out<sc_logic>
out¶ Serialized encoded output
-
sc_signal<sc_lv<memory * input>>
mem_bus_conv¶ Arranged for convolution memory bus
-
sc_signal<bool>
clk_div¶ Divided clk signal
-
sc_signal<sc_logic>
data_in_drv[memory]¶ Data in driver (distribute to shift registers)
-
sc_signal<sc_logic>
conv_outs[output]¶ Convolution outputs array
-
convolution<memory * input> *
conv_block[output]¶ Convolution Modules
-
shift_register<memory> *
register_bank[input]¶ Shift Registers
-
clock_divider<output> *
clk_divider¶ Clock divider
-
serializer<output> *
serial¶ Serializer for the output
-
void
prc_split_input(void)¶ Split the in every input to connect with each shift register of the bank. There are input shift registers.
-
list
sensitivity¶ in
-
list
-
sc_core::sc_in_clk
Structure¶
Fig. 12 shows the structure of the our Viterbi encoder implementation without using lookup tables.
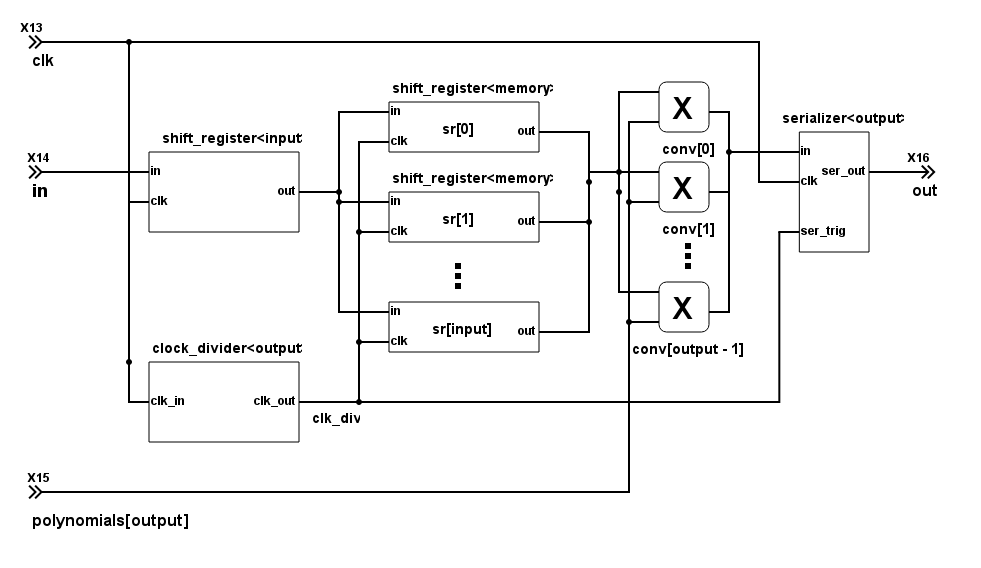
Fig. 12 Viterbi Encoder Circuit
Simulation Results¶
The code of the test case of the viterbi_encoder_lkup is shown below;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | ...
static const int n = 2;
static const int k = 1;
static const int m = 4;
...
static const int output_size = n * (2* m - k);
SC_TEST(encoder) {
...
// Create signals
sc_signal<sc_lv<k> > in; //logic vector for shift register
sc_signal<sc_logic> out_0; //logic output of output of convolution
sc_signal<sc_logic> out_1; //logic output of output of convolution
sc_signal<sc_lv<m> > mem_bus[k]; //logic vector for shift register
sc_signal<sc_lv<m * k> > mem_bus_conv; //logic vector for shift register
sc_signal<sc_logic> serial_in_drv[n];
sc_signal<sc_lv<m> > polynomials[n];
sc_lv<output_size> expected_out = "11110111010111";
sc_lv<m> input_out = "1011";
// Create module
encoder<n, k, m> vencoder("ViterbiEncoder");
encoder_lkup<n, k, m> vencoder_lkup("ViterbiEncoderLKUP");
// Assign polynomials
polynomials[0] = "1111";
polynomials[1] = "1101";
...
vencoder.clk(sys_clock);
vencoder.in(in);
vencoder.out(out_0);
vencoder_lkup.clk(sys_clock);
vencoder_lkup.in(in);
vencoder_lkup.out(out_1);
// Output verification (11110111010111)
current_check_time = 220;
SC_EXPECT_AT(sc_logic('0'), out_0, current_check_time, SC_NS);
SC_EXPECT_AT(sc_logic('0'), out_1, current_check_time, SC_NS);
current_check_time += clock_period / 2;
for (int i = 0; i < output_size; i++) {
SC_EXPECT_AT(sc_logic(expected_out.get_bit(output_size - i -1)), out_0, current_check_time, SC_NS);
SC_EXPECT_AT(sc_logic(expected_out.get_bit(output_size - i -1)), out_1, current_check_time, SC_NS);
current_check_time += clock_period;
}
...
// Set the serial input to encode
for (int i = 0; i < m; i++) {
in = sc_lv<k>(sc_logic(input_out.get_bit(m - i -1)));
sc_start(2*clock_period, SC_NS);
}
in = "0";
sc_start(200, SC_NS);
}
|
Note
- Both implementation of Viterbi encoder are being tested the same way.
- Both encoders have the same input.
- The input is \(b1011\) and the expected encoded value \(b11110111010111\)
- The output is being verified with the
SC_EXPECT_AT
Fig. 16 shows the result of the simulation.
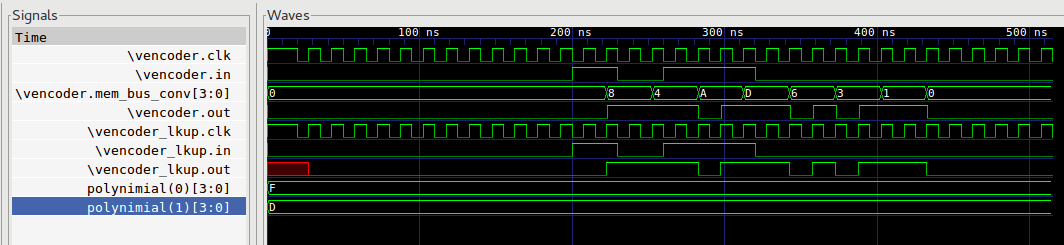
Fig. 13 Encoder Simulation Wave Result
Note
- At \(200ns\) the input starts to be in encoded. Both encoders have the same input.
- Just \(output\) cycles after the encoding starts.
- The encoded value’s MSb is transmitted first.
- Every in state has to be stable for \(output\) cycles.
- out_0 and out_1 have the same baudrate as the sys_clock
- out_0 and out_1 present the same behavior as expected
- out_0 and out_1 are set back to sc_logic(‘0’) after encoding is done (\(430ns\)).